EA47 : CompletePower™ Drives
Technology: Brushless Servo-PWM
Quadrants: 4
Nominal Current: 9 and 18A
Quadrants: 4
Nominal Current: 9 and 18A
For BLDC Motors. Up to 1260W.
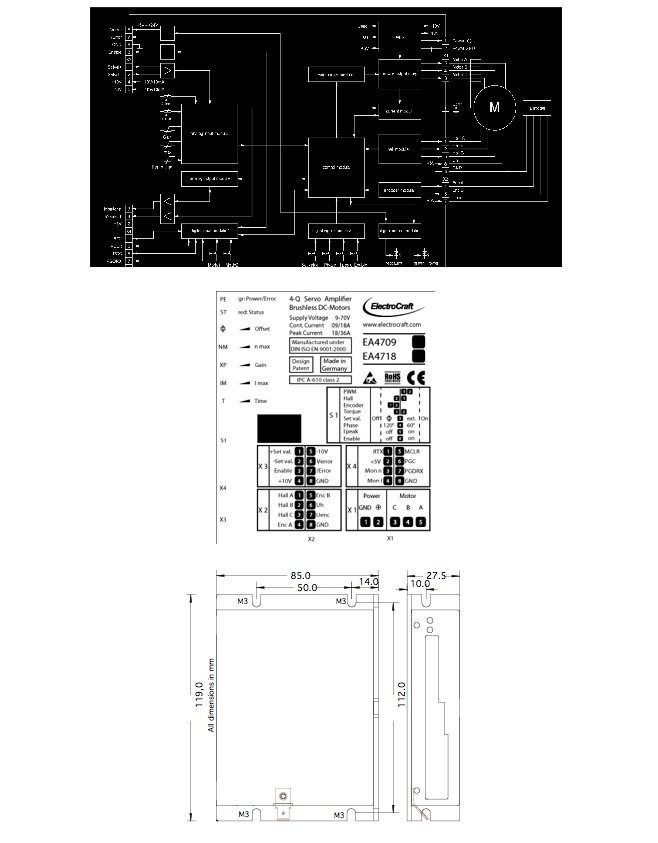
This four-quadrant brushless DC servo amplifier is fully enclosed in a rugged aluminum case which can be DIN-rail mounted of panel mounted for easy integration. The drive can be configured in a variety of torque and speed control modes with the mode of operation being set by simple DIP switches. Both the 98A and 18A versions of this drive have an adjustable current limit and can be powered by the same 9 - 70 VDC range of supply voltage. The drive is protected against over-current and over-temperature and motor short-circuit and incorporates state of the art MOSFET technology for maximum efficiency. Connectivity is tool-free with RJ45-CAT5 connectors for control/feedback inputs and push-type terminals for supply power and motor connections.

EA47 Technical Drawings
EA47 Specifications
| Model Numbers | Power Supply Voltage (VDC) | Aux Voltage (VDC) | Continuous Current (Amps) | Peak Current (Amps) | Max Power (Watts) | Frequency of Power Output Stage (kHz) | Efficiency (%) |
|---|---|---|---|---|---|---|---|
| EA4709 | 9 - 70 | 5 - 24 | 9 | 18 | 630 with heatsink | 50 | 97 |
| EA4718 | 9 - 70 | 5 - 24 | 18 | 36 | 1260 with heatsink | 50 | 97 |
| Control Inputs | |
|---|---|
| Set Value | -10 to +10 VDC |
| Enable | TTL / +24 VDC |
| Features Selected by Dip Switches | |
| PWM-, Hall-, Enc-, Torque | not set/set |
| Phase | 120/60 |
| Enable | on / off |
| Set value via Offset | offset/ext |
| Ipeak | on/off |
| Outputs | |
| Auxillary Voltage Sources | 5V/50mA |
| Auxillary Voltage Sources | 10 VDC/10mA |
| Monitor I | 0.5V/1A |
| Monitor n | 10VDC/nmax |
| Error | open collector / push pull / TTL / 24V |
| Display | |
| LEDs | green = power / yellow = error |
| Potentiometers | |
| Function of Potentiometers | offset / nmax / gain / ramp time |
| Mechanical Specs | |
| Dimensions (L x W x H) inches / (mm) | (119) X (85) X (27.5) |
| Mounting Hole Distance (mm) | 112 X 50 |
| Weight in ounces / (grams) | (220) |
| Operating Temperature (°C) | -10 to +45 |
| Storage Temperature (°C) | -40 to +85 |
| Humidity Range Not Condensing (% rH) | 20% to 80% Relative, Non-condensing |
| Operation Mode | |
| Operation Mode | speed-control by hall speed-control by encoder torque control |